Введение
При выборе подходящего аппарата для ортодонтического лечения важно учитывать ограничения, причиной которых является локальная или генерализованная потеря тканей пародонта из-за утраты зубов или ортопедических конструкций. Отсутствие влияния на рост, наоборот, позволяет более точно спланировать, каким будет результат лечения, так как движение зубов будет более точно отражать действующую на них силу. Направление и локализация линии действия приложенной силы определяет, как и в каком направлении будут перемещаться отдельные зубы или группы зубов. Единственными факторами, влияющими на результаты лечения будут мягкие ткани, баланс между внутренними и наружными мышечными волокнами и окклюзионными силами.
У взрослых пациентов с помощью диагностических гипсовых моделей (Рис. 7.1), комбинации окклюзограммы и цефалограммы или виртуальных моделей (Рис. 7.1), созданных либо путем внутриротового сканирования, сканирования оттисков или моделей, можно детально спланировать необходимые зубные перемещения в трех плоскостях (Mah and Sachdeva 2001; Sachdeva 2001; Santoro et al. 2001; Vlaskalic and Boyd 2002; Freshwater 2003; Joffe 2003;Santoro et al. 2003; Zilberman et al. 2003; Joffe 2004; Dalstraand Melsen 2009).
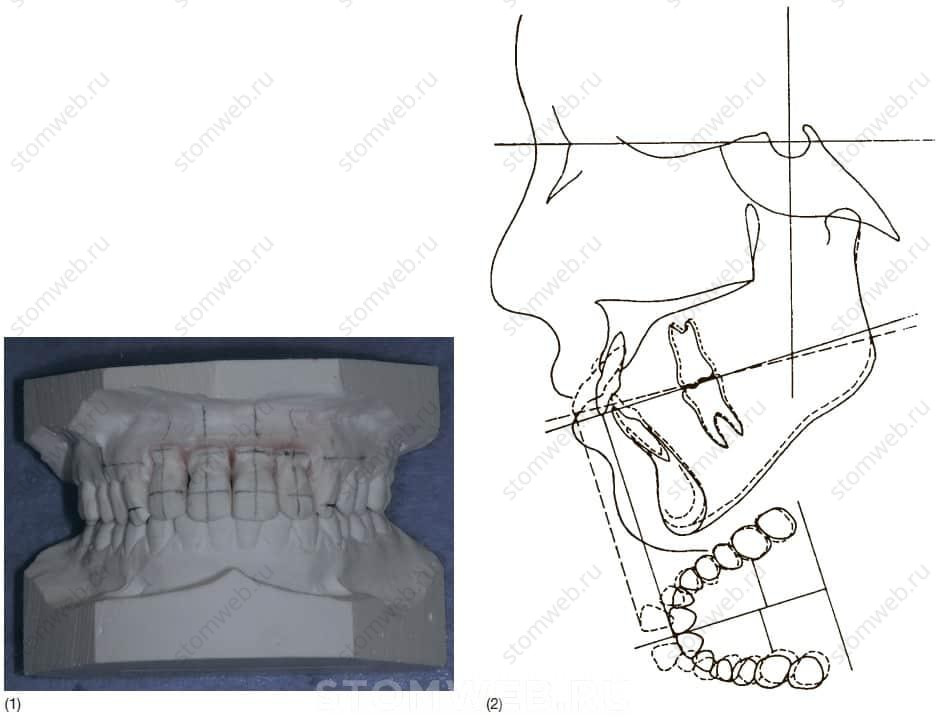
Рис. 7.1 (1) Расчеты сделанные на моделях. Отмечена сетка, нарисованная до перемещения зубов. Она позволяет стоматологу оценить реальное перемещение зубов, созданное с помощью расчетов. В этом случае верхние резцы были интрузированы и подверглись ретракции. (2) Цель лечения, проиллюстрированная с помощью комбинации окклюзограммы и цефалограммы. Протрузия верхних резцов и щели между ними будут исправлены с помощью ретракции четырех резцов без особого перемещения других зубов.